
دو نوع سیم پیچی جهت هستههای مغناطیس استپ موتورهای دو فاز وجود دارد: تک قطبی و دوقطبی.
یکی دیگر از ویژگیهای موتور که بر کنترل نیز تأثیر میگذارد، تنظیم سیم پیچهای استاتور است که نحوه تغییر جهت جریان را تعیین میکند.
برای دستیابی به حرکت روتور، نه تنها باید به سیم پیچها انرژی داد، بلکه باید جهت جریان را نیز کنترل کرد، که جهت میدان مغناطیسی تولید شده توسط خود سیم پیچ را تعیین میکند (شکل 1 را ببینید). در موتورهای پله ای موضوع کنترل جهت جریان با دو رویکرد متفاوت حل میشود.
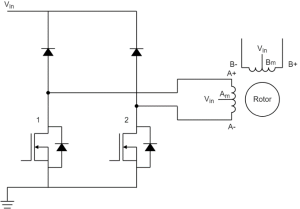
در موتورهای پلهای تک قطبی، یکی از سیمها به نقطه مرکزی سیم پیچ متصل میشود (شکل 2 را ببینید). این اجازه میدهد تا جهت جریان را با استفاده از مدار و اجزای نسبتا ساده کنترل کنید. سیم مرکزی (AM) به VIN ولتاژ ورودی متصل است (شکل 1 را ببینید).
اگر ماسفت 1 فعال باشد، جریان از AM به A+ میرود. اگر ماسفت 2 فعال باشد، جریان از AM به A- جاری میشود و میدان مغناطیسی در جهت مخالف ایجاد میکند.
همانطور که در بالا اشاره شد، این رویکرد اجازه میدهد تا یک مدار درایور سادهتر (فقط با استفاده از دو نیمه هادی) ساخت اما میدان مغناطیسی ایجاد شده نصف مقداری است که در تمام مس در ساختار موتور ایجاد میشود. علاوه بر این، ساخت این موتورها دشوارتر است، زیرا باید سرسیمهای بیشتری به عنوان ورودی موتور در دسترس باشند.
موتورهای پلهای دوقطبی
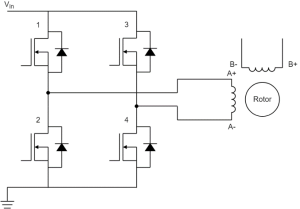
در موتورهای پلهای دوقطبی، هر سیم پیچ فقط دو سر در دسترس دارد و برای کنترل جهت باید از پل H استفاده شود (شکل 3 را ببینید). همانطور که در شکل 1 نشان داده شده است، اگر ماسفت های 1 و 4 فعال باشند، جریان از A+ به A- جریان مییابد، در حالی که اگر ماسفت های 2 و 3 فعال باشند، جریان از A- به A+ میگذرد و یک میدان مغناطیسی در جهت مخالف ایجاد میکند.
این روش به مدار درایور پیچیدهتری نیاز دارد، اما به موتور اجازه میدهد تا حداکثر گشتاور را برای مقدار مسی که استفاده میشود، به دست آورد.
با پیشرفت تکنولوژی، مزایای پله تک قطبی کمتر به کار میرود و پلههای دوقطبی در حال حاضر محبوبترین هستند.
چهار تکنیک مختلف کنترل برای استپ موتور وجود دارد:
1- استپ های حالت موجی
در حالت موجی، هر بار فقط یک فاز انرژی میگیرد (شکل 4 را ببینید). برای سادگی، میگوییم که اگر جریان از سیم + به سیم- یک فاز (مثلاً از A+ به A-) در جهت مثبت حرکت میکند در غیر این صورت، جهت منفی است. با شروع از سمت چپ، جریان فقط در فاز A در جهت مثبت جریان دارد و روتور، که با یک آهنربا نشان داده میشود، با میدان مغناطیسی تولید شده توسط آن همسو میشود.
در مرحله بعد، فقط در فاز B در جهت مثبت جریان مییابد و روتور 90 درجه در جهت عقربههای ساعت میچرخد تا با میدان مغناطیسی ایجاد شده توسط فاز B همسو شود.
بعداً فاز A دوباره انرژی میگیرد، اما جریان در جهت منفی جریان مییابد. و روتور دوباره 90 درجه میچرخد. در مرحله آخر، جریان در فاز B منفی میشود و روتور دوباره 90 درجه میچرخد.
2- حالت تمام پله
در حالت تمام پله، دو فاز همیشه به طور همزمان برقرار میشوند. شکل 5 مراحل مختلف این حالت درایور را نشان میدهد. مراحل مشابه حالت موجی هستند، مهمترین تفاوت این است که با این حالت، موتور قادر است گشتاور بیشتری تولید کند زیرا جریان بیشتری در موتور جریان دارد و میدان مغناطیسی قویتری ایجاد میشود.
3- حالت نیم پله
حالت نیم پله ترکیبی از حالتهای موجی و تمام مرحلهای است (شکل 6 را ببینید). با استفاده از این ترکیب، اندازه گام به نصف کاهش مییابد (در این حالت به جای 90 درجه، 45 درجه).
تنها عیب این روش این است که گشتاور تولید شده توسط موتور ثابت نیست، زیرا زمانی که هر دو فاز انرژی دارند، گشتاور بیشتر و زمانی که فقط یک فاز برق میزند، گشتاور ضعیفتر است.
4- میکرو استپینگ
میکرو استپینگ را میتوان به عنوان راهکار بهبود برای حالت نیمه پله در نظر گرفت، زیرا این امکان را به شما میدهد تا اندازه پله را بیشتر کاهش دهید و گشتاور خروجی ثابتی داشته باشید. این امر با کنترل شدت جریان در هر فاز حاصل میشود.
استفاده از این حالت نیاز به درایور موتور پیچیدهتری نسبت به راه حلهای قبلی دارد. شکل7 نحوه عملکرد میکرواستپینگ را نشان میدهد.
IMAX حداکثر جریانی است که میتواند در یک فاز جریان یابد، از سمت چپ شروع میشود، در شکل اول IA = IMAX و IB = 0. در مرحله بعد، جریانها برای رسیدن به IA = 0.92 x IMAX و IMAX x IB = 0.38 کنترل میشوند؛ که یک میدان مغناطیسی ایجاد میکند که در مقایسه با قبلی 22.5 درجه در جهت عقربههای ساعت میچرخد.
این مرحله با مقادیر جریان مختلف تکرار میشود تا به موقعیتهای 45 درجه، 67.5 درجه و 90 درجه برسد. این قابلیت کاهش نصف اندازه پله را در مقایسه با حالت نیمه مرحلهای فراهم میکند، اما میتوان حتی فراتر رفت.
استفاده از میکرواستپینگ جهت دستیابی به وضوح موقعیت بسیار بالا کمک میکند، اما این مزیت منجر به ساخت یک دستگاه پیچیده تر برای کنترل موتور و گشتاور کمتر تولید شده در هر مرحله است.
در واقع، گشتاور متناسب با سینوس زاویه بین میدان مغناطیسی استاتور و میدان مغناطیسی روتور است. بنابراین، هنگامی که پلهها کوچکتر هستند، گشتاور کوچکتر است. این روش ممکن است منجر به از دست دادن برخی از مراحل شود، به این معنی که موقعیت روتور تغییر نمیکند حتی اگر جریان در سیم پیچ استاتور تغییر کند.
منبع:MPS