
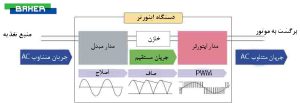
اولین چیزی که باید در هنگام تقویت درک خود از ساختار داخلی یک دستگاه اینورتر در نظر داشته باشید، این است که مدار مبدل جریان متناوب (AC) را که از منبع تغذیه میآید به جریان مستقیم (DC) و مدار اینورتر تبدیل میکند. جریان مستقیم تبدیل شده (DC) را دوباره به جریان متناوب (AC) تبدیل میکند. آنها به عنوان یک مجموعه کار میکنند. نمودار زیر نقشی که هر دو ایفا میکنند و نحوه کار آنها را نشان میدهد.
اولاً مدار مبدل مورد استفاده در قسمت جلویی دائماً جریان متناوب را به جریان مستقیم تبدیل میکند. این فرآیند اصلاح نامیده میشود. جهت و بزرگی موج به طور متناوب در طول زمان تغییر میکند زیرا جریان متناوب یک موج سینوسی است. بنابراین از یک دیود که یک وسیله نیمه هادی است استفاده میشود تا الکتریسیته را در جهت رو به جلو برای تبدیل آن به جریان مستقیم و نه در جهت معکوس عبور دهد.
هنگامی که جریان مستقیم از دیود عبور میکند، فقط جهت رو به جلو جریان الکتریسیته را عبور میدهد و یک پیک مثبت ظاهر میشود. با این حال، نیمه دیگر چرخه هدر خواهد رفت، زیرا از قله در جهت منفی عبور نمیکند. دلیل اینکه ساختار دیود مانند یک پل است این است که میتواند قله منفی را در جهت رو به جلو عبور دهد. این یکسوسازی تمام موج نامیده میشود، زیرا هر دو قله موج جلو و منفی را تغییر میدهد.
با این حال، یکسوسازی تمام موج به خودی خود نمیتواند یک شکل موج صاف ایجاد کند زیرا آثاری از جریان متناوب و نوسانات ولتاژ موجدار باقی میماند. بنابراین، برای تمیز کردن این خازنها بارها و بارها شارژ و دشارژ میشود و شکل موج را به آرامی صاف کرده و نزدیک به جریان مستقیم تغییر میدهد.
مدار اینورتر سپس جریان متناوب را با ولتاژ و فرکانس متغیر خروجی میدهد. مکانیزم تبدیل DC/AC ترانزیستورهای قدرت مانند IGBT (Transistor Bipolar Bipolar Insulated Gate) را سوئیچ میکند و فواصل ON/OFF را برای ایجاد امواج پالسی با عرضهای مختلف تغییر میدهد. سپس آنها را به یک موج سینوسی شبه ترکیب میکند. این “مدولاسیون عرض پالس (PWM)” نامیده میشود.
رایانه به طور خودکار پهنای پالس را کنترل میکند. برخی از کامپیوترهای اختصاصی تک تراشهای که موتور را کنترل میکنند شامل محصولی با عملکرد PWM از قبل نصب شده است. این امکان ایجاد امواج شبه سینوسی با فرکانسهای مختلف و کنترل سرعت چرخش موتور را به سادگی با تعیین پارامترهای مورد نظر فراهم میکند.